


Connect with me :)
Electro-hydraulic Dune Buggy
Electro-Hydraulic Dune Buggy
(Personal Project)
Industry: Automotive / Mobility / Mechanical Design
Timeline: Two academic years
Role: Product Designer | Fabrication & Manufacturing
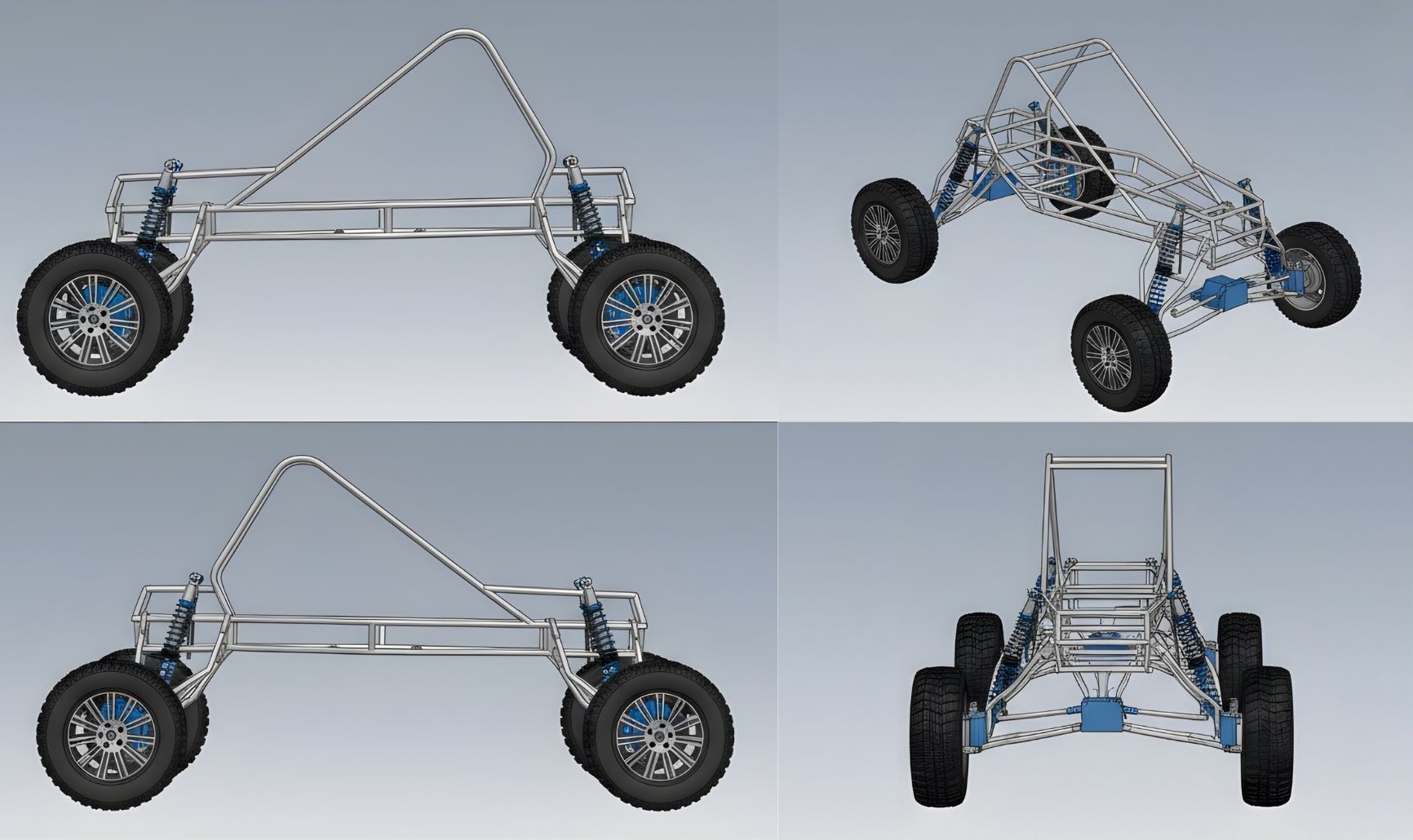
This two-year personal project involved the design, fabrication, and manufacturing of an electro-hydraulic dune buggy focused on improving vehicle maneuverability. I developed a custom steering knuckle and linkage system that enables a “crab-walk” mode, allowing the vehicle to move laterally without changing orientation. Built through iterative CAD development and hands-on prototyping, the project explores how this steering system could extend beyond off-road use to improve low-speed control and parallel parking in everyday vehicles.
Solidworks CAD
Steering Knuckle Mechanism
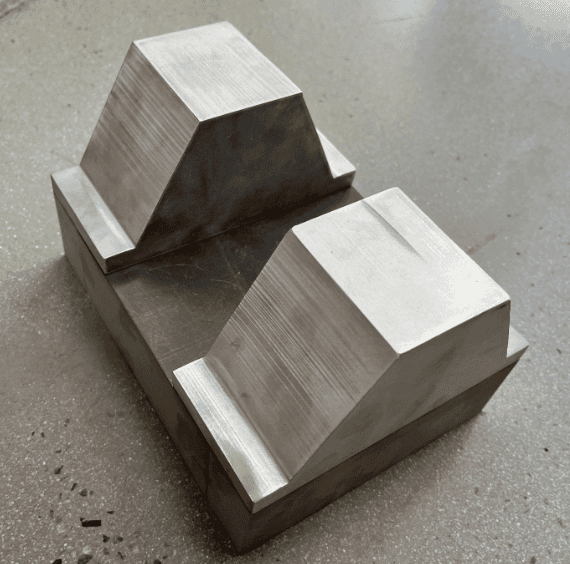


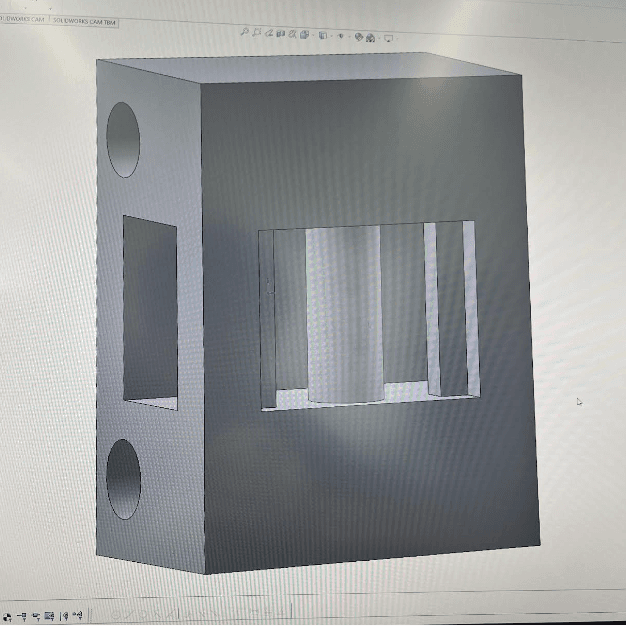
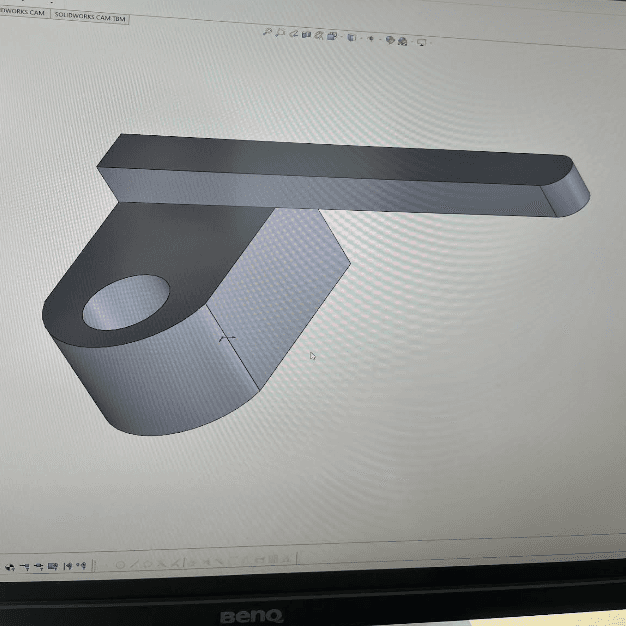
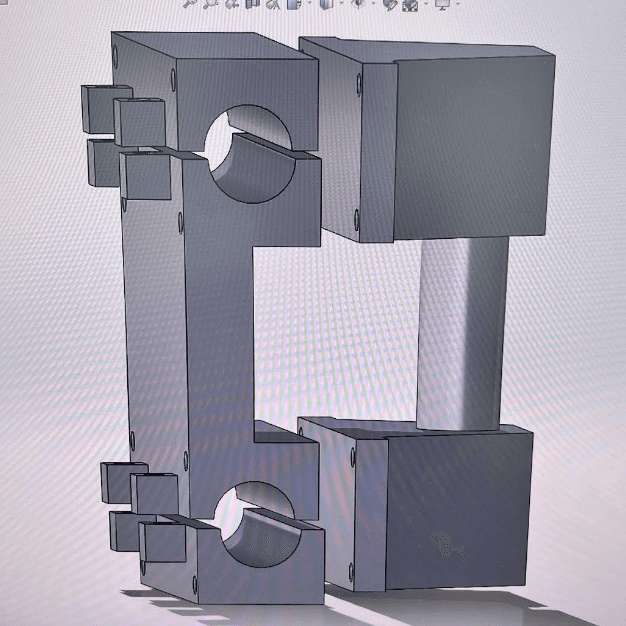
A two school year project focused on designing and building a custom dune buggy. The steering knuckle was redesigned in SolidWorks to enable a hydraulic “crab walk” feature, allowing the vehicle to move laterally without changing direction.